1. INTRODUCTION
There is a continuing controversy regarding the nature and applicability
of the kinematic wave model. Researchers and practitioners alike have reported
successes and failures of the model, with papers continuing to appear
in the literature describing what the model can and cannot do (Hromadka
and DeVries 1988). Current areas of concern focus on the following issues:
(1) Whether the kinematic wave can describe physical diffusion, and if so,
under what circumstances; (2) whether the kinematic wave can eventually
replace other well-established methods of surface runoff generation such as
the unit hydrograph; and (3) whether the kinematic shock is as common in
practice as calculations would seem to indicate.
While answers to these questions can be found in the literature, they are
dispersed among various sources and not readily accessible. This difficulty
appears to be fueling the current controversy (Dawdy 1990; Goldman 1990;
Hromadka and DeVries 1990; Merkel 1990; Unkrich and Woolhiser 1990;
Woolhiser and Goodrich 1990). Therefore, the aim of the present paper is
to review the concept of kinematic wave, delineate its range of applicability,
and critically examine its overall modeling philosophy. It is hoped that this
review will help focus the attention of researchers and practitioners so that
the controversy may be brought to a timely end.
2. BACKGROUND
The concept of kinematic wave is well established among the existing
methods to solve unsteady, one-dimensional, gradually varied open-channel
flow problems. In contrast to the dynamic wave, which features a significant
inertial component, a kinematic wave is one in which the inertial component
is too small to be of any practical importance. In unsteady open-channel
flow modeling, a first type of kinematic wave arises when the governing
equations are simplified by neglecting the local inertia, convective inertia,
pressure-gradient, and momentum-source terms (Lighthill and Whitham 1955).
A second, less restrictive type can be formulated by neglecting the local
inertia, convective inertia, and momentum-source terms, but keeping the
pressure-gradient term (Hayami 1951). To avoid confusion between these
two types of kinematic waves, it is common practice to refer to the first type
as kinematic wave proper, and to the second as diffusion wave (Ponce and
Simons 1977).
From the physical standpoint, the kinematic wave assumption amounts to
substituting a uniform flow formula (such as Manning's or Chezy's) for the
equation of motion. In essence, it says that as far as momentum is concerned,
the flow can be considered steady. The unsteadiness of the phenomenon,
however, is preserved through the rate-of-rise term in the continuity
equation (Liggett 1975). The implication of the kinematic wave assumption
is that unsteady open-channel flow can be visualized as a succession of steady
uniform flows, with the water surface slope remaining constant at all times.
This, of course, can be reconciled with reality only if the flow unsteadiness
is very mild, i.e., if the changes in momentum are indeed negligible compared
to the forces driving the steady component of the motion (gravity and
friction).
From the mathematical standpoint, the kinematic wave assumption results
in a considerable simplification of the equation of motion, reducing it to a
statement of uniform flow (such as, for instance, the Manning equation).
Combining this latter equation with the equation of continuity gives also to
a first-order partial differential equation, referred to as the kinematic wave
equation:
∂Q ∂Q
_____ + c _____ = c qL
∂t ∂x
| (1) |
in which Q = discharge; c = kinematic wave celerity; qL = lateral inflow;
x = spatial variable; and t = temporal variable. This equation is applicable
to streamflow modeling as well as to channel and gutter flow. For overland
flow applications, the kinematic wave equation is expressed in terms of unit-width discharge as follows:
∂q ∂q
_____ + c _____ = c i
∂t ∂x
| (2) |
in which q = unit-width discharge; i = effective rainfall intensity; and the
other terms are as defined previously.
The kinematic wave celerity is defined as the slope of the rating curve,
either discharge-flow area (Q = αAβ )
in the case of streamflow, or unit- width
discharge-flow depth (q = ad m )
for overland flow. Accordingly, c = dQ/dA = β(Q/A) = βu
in the case of streamflow; and likewise, c = m (q /d ) = mu
for overland flow, in which u = mean velocity. In natural channels,
the kinematic wave celerity is alternatively expressed as c = (1/T ) (dQ/dy ),
in which T = channel top width, and y = stage.
Equation 1 (and by extension, Eq. 2) is a differential equation of first order;
therefore, it can describe convection but not diffusion, which is a second-order
process. In practice, this means that the kinematic wave equation can
describe the travel of a flood wave, but not its attenuation as it propagates
downstream. Although Eq. 1 cannot describe diffusion, it is a quasi-linear
equation because the kinematic wave celerity is a function of discharge. This
gives kinematic waves the tendency to change in shape as they propagate.
If the celerity increases with discharge, the leading face of the wave will
steepen; conversely, if the celerity decreases with discharge, the leading face
of the wave will flatten out. In overland flow and inbank streamflow, the
tendency is for the wave to steepen; in shallow-overbank streamflow, the
tendency is for the wave to flatten out.
3. KINEMATIC WAVE SOLUTIONS
Solutions to Eq. 1 (or Eq. 2) can be attempted in a variety of ways. Analytical
solutions are possible for linearized analogs of the governing equations
[see for instance Lighthill and Whitham (1955) and Ponce and Simons
(1977)]. These solutions describe the convection of a flow quantity (either
Q or q) with the celerity c in the absence of diffusion. Numerical solutions
are possible using the method of characteristics or the finite difference method.
Early work on the kinematic wave used the method of characteristics. In
overland flow applications, the nonlinearity (or rather the quasi-linearity) of
the phenomena usually led to wave steepening and the eventual development
of a kinematic shock. A kinematic shock is a kinematic wave that has steepened
to the point where its rising limb has an almost vertical face, wherein
the flow develops a singularity and loses its gradually varied property.
4. NUMERICAL DIFFUSION AND DISPERSION
Although kinematic wave solutions using the method of characteristics are
prone to shock development, ostensibly because of their lack of diffusion,
solutions using the finite difference method exhibit a somewhat different
behavior. Finite difference solutions, by virtue of their discrete nature, introduce
appreciable amounts of numerical diffusion and numerical dispersion.
These numerical effects interfere with the physical effects, modifying
them (Abbott 1976). For instance, in overland flow applications, the numerical
diffusion has the effect of counteracting the tendency of the wave
to steepen, thereby arresting shock development and allowing the unsteady
gradually varied flow computation to continue.
The presence of numerical diffusion and dispersion in a numerical solution
using the finite difference method is at the crux of the controversy surrounding
the kinematic wave model. A numerical scheme is characterized by its
amplitude and phase error portraits (Leendertse 1967). The amplitude portrait
describes the way in which the numerical wave amplitude approaches
the physical wave amplitude, with the deviation being interpreted as numerical
diffusion. The phase portrait describes the way in which the numerical
wave phase approaches the physical wave phase, with the deviation
being interpreted as numerical dispersion. Examples of amplitude and phase
portraits for convection problems are given by Cunge (1969) and Ponce et
al. (1979).
Finite difference solutions of the kinematic wave equation exhibit varying
amounts of numerical diffusion and dispersion depending on the type of scheme
used to discretize Eq. 1 (or Eq. 2). Fully centered schemes are of second
order, exhibiting no numerical diffusion. However, these schemes may exhibit
numerical dispersion for Courant numbers other than 1. (In kinematic
wave theory, the Courant number is defined as the ratio of the physical
celerity, i.e. the kinematic wave celerity c, to the "grid celerity" Δx /Δt,
with Δx = the spatial increment, or space step, and Δt = the temporal increment,
or time step.) Off-centered schemes are of first order, exhibiting
varying amounts of numerical diffusion, depending on the size of Δx and
Δt. Smaller increments result in smaller amounts of numerical diffusion, with
the numerical diffusion vanishing as the increments are driven to zero. These
schemes also exhibit variable amounts of numerical dispersion for Courant
numbers other than 1.
Numerical diffusion arises due to the neglect of the second-order term of
the corresponding Taylor series expansion of the related discrete analog. Numerical
dispersion arises due to the neglect of the third-order term of the
Taylor series expansion (Cunge 1969; Ponce et al. 1979). Therefore, in a
typical application, numerical diffusion is usually about an order of magnitude
greater than numerical dispersion. In practice, this means that as a
rule, most of the error of numerical solutions can be attributed to numerical
diffusion rather than to numerical dispersion. Exceptions are the cases in which
the Courant number is significantly less than 1, in which case the amount of
numerical
dispersion may grow to the point where it compares in size with the amount of
numerical diffusion.
Numerical diffusion manifest itself as the diffusion or attenuation of the
calculated runoff hydryograph. Since the kinematic wave equation has no built-in
physical diffusion, it follows that a finite difference solution is actually
simulating physical diffusion through numerical diffusion. The fact that the
latter is artificial, and intrinsically related to the grid size, can be readily demonstrated
by solving the same problem several times, each time halving the
spatial and temporal increments [see for instance Ponce (1986)]. Carried to
a practical limit, this test leads to the eventual disappearance of the numerical
diffusion in question, with the result approaching the analytical solution
of the kinematic wave. The recognition of this fact prompted the USDA Soil
Conservation Service to retire its convex method of flood routing in the early
1980s. The convex method showed considerable sensitivity to the grid size,
with the numerical diffusion vanishing as the grid size was gradually reduced.
Numerical dispersion manifests itself as dispersion; that is, as the steepening
or flattening of the rising limb of the calculated runoff hydrograph.
In certain extreme cases, the numerical dispersion is responsible for the wiggles,
or the (usually small) negative outflows observed at the beginning or
end of the calculated runoff hydrograph (Hjelmfelt 1985). In practice, these
negative outflows are small, and disappear (together with all traces of numerical dispersion)
as the space and time steps are chosen such that the Courant number
approaches 1.
Since numerical diffusion and dispersion are inherent in the choice of space
and time steps (and their ratio relative to the wave celerity), the result of a
finite difference solution of Eqs. 1 or 2 is per force grid dependent; i.e., the
calculated runoff hydrograph varies with the choice of grid size. Therefore,
it seems pointless to try to "calibrate" a kinematic wave model by varying
a physical parameter such as Manning's n in order to match
calculated results
with observed data. This practice amounts to curve-fitting; at best it is good
conceptual modeling, but it should not be interpreted as deterministic modeling.
5. DIFFUSION WAVE MODELING
In practice, actual runoff hydrographs do exhibit a certain amount of diffusion.
To properly simulate this diffusion it is necessary to extend kinematic
wave theory to encompass the related diffusion wave theory. Following Hayami
(1951) and Lighthill and Whitham (1955), the diffusion wave equation
is derived by neglecting the local inertia, convective inertia, and momentum-source
terms in the equation of motion, leading to the following equation
for streamflow and channel flow:
∂Q ∂Q ∂ 2Q
_____ + c _____ = v ______ + c qL
∂t ∂x ∂x 2
| (3) |
and a similar equation for overland flow:
∂q ∂q ∂ 2q
_____ + c _____ = v _____ + c i
∂t ∂x ∂x 2
| (4) |
with v = hydraulic diffusivity, defined as follows:
Q q
v = ______ = ______
2TSo 2So
| (5) |
and So = bottom slope; and other terms are as previously defined. Eqs. 3
and 4 describe the movement of kinematic waves with a diffusion component,
for short diffusion waves. Unlike their counterparts Eqs. 1 and 2, Eqs.
3 and 4 are second-order parabolic differential equations and are, therefore,
able to describe physical diffusion, with the diffusion coefficient defined by
Eq. 5.
The diffusion wave equation can be solved either analytically, leading to
Hayami's diffusion-analogy solution for flood waves, or numerically, with
the aid of a numerical scheme for parabolic equations, such as the Crank-Nicolson
scheme (Crandall 1956). An alternative is to extend the finite
difference solution of the kinematic wave to the realm of diffusion waves
by matching physical and numerical diffusivities (Cunge 1969; Dooge 1973).
The physical diffusivity is the hydraulic diffusivity given by Eq. 5. The
numerical diffusivity is the numerical diffusion coefficient of the discretized
kinematic wave model, i.e., the coefficient of the leading (second-order)
error term. When the Muskingum scheme is used to model the kinematic
wave, this method is referred to as Muskingum-Cunge model (Flood 1975;
Ponce and Yevjevich 1979).
The Muskingum-Cunge method has the significant advantage over conventional
kinematic wave models of being essentially grid independent (Ponce
and Theurer 1982; Ponce 1986). Therefore, calibration requires only a fine
tuning of the frictional and cross-sectional parameters such as Manning's n
and flow rating exponent (either β for channel flow or m for overland flow).
Then, the choice of spatial and temporal increments is based solely on considerations of problem scale.
6. APPLICABILITY OF KINEMATIC WAVES
The question of the applicability of kinematic waves has interested researchers
and practitioners alike. Although kinematic waves were originally
used for describing river flows (Seddon 1900), it is in the field of overland
flow that questions first arose with respect to its applicability and accuracy.
Notable among these contributions is that of Woolhiser and Liggett (1967),
who identified a parameter k defined as follows:
SoLo
k = _______
doFo2
| (6) |
to characterize the applicability of the kinematic wave to overland flow situations.
In Eq. 6, So = bottom slope; Lo = length of the overland flow plane;
do = normal depth; and Fo = Froude number based on normal flow. The
parameter k has been referred to in the literature as kinematic flow number
(Liggett 1975). This parameter can be used as a criterion to aid in determining
whether the kinematic wave solution is sufficiently accurate when
used to solve overland flow problems. According to Woolhiser and Liggett
(1967), a value of k ≥ 20 indicates that the flow is strongly kinematic, and
therefore suited to solution using the kinematic wave equation. More recently,
however, Morris and Woolhiser (1980) have stated that for low-Froude-number
flows, it is also necessary that k Fo2 ≥ 5, a condition compatible with the Woolhiser and Liggett criterion (k ≥ 20) for the case of Fo ≥ 0.5.
Ponce et al. (1978) used an analytical solution of the linearized equation
set (Lighthill and Whitham 1955) to develop criteria for the applicability of
kinematic and diffusion waves to open channel flow. They used sinusoidal
perturbations to the mean flow, with L = wavelength; and T = wave period.
For kinematic waves, the Ponce et al. criterion states that for the solution
to be within 95% accuracy after one period of propagation, the dimensionless
wave period has to be greater than 171. The dimensionless wave period τ
is defined as follows:
T Souo
τ = ________
do
| (7) |
in which uo = reference flow mean velocity; do = reference flow depth; and
So = bottom slope. For practical applications, the wave period T can be taken
as twice the time-of-rise of the flood wave.
For diffusion waves, a parameter τ/Fo, in which Fo = reference flow Froude
number, is shown to be a better descriptor of the overall accuracy, accounting
for both amplitude and phase errors. A practical applicability criterion
for diffusion waves is the following (Ponce et al. 1978):
τ g 1/2
_____ = TSo ( _____ ) ≥ 30
Fo do
| (8) |
in which g = gravitational acceleration; and the other terms are as previously defined.
Ponce et al. (1978) confirmed the conclusions of Lighthill and Whitham
(1955), as well as those of many others, that most overland flow situations
would satisfy the kinematic wave criterion, and that most flood wave propagation
cases in stream channels (excluding those with significant downstream control)
would satisfy the diffusion wave criterion. Only in situations
with markedly strong dissipative tendencies (for instance, a dam-break flood
wave), flow into large reservoirs (with substantial backwater effects), or flow
reversals would it be necessary to resort to the dynamic wave to properly
describe the propagation of shallow-water waves.
7. OVERLAND FLOW VERSUS UNIT HYDROGRAPH
The issue of whether an overland flow kinematic wave solution can replace
(and perhaps eventually retire) the unit hydrograph as a practical method
of runoff generation remains clouded in controversy. Due to the fundamental
differences between these two methods, a resolution of this conflict does not
appear to be forthcoming in the near future. The overland flow kinematic
wave solution is a deterministic, distributed-parameter, hydraulic-data-intensive
method (requiring geometric and frictional parameters), which is primarily
applicable to small catchments [i.e., those less than 1 sq mi (2.5 km2 )],
for which the idealizations inherent in mathematical modeling can be justified
on practical grounds. In other words, for the kinematic wave solution
to be useful, the discretization must reflect what is actually occurring in the
field. When used indiscriminately, without due regard for problem scale,
there is a risk that the amount of lumping introduced may interfere with the
deterministic character of the method and its ability to simulate overland
flows in a distributed context.
In contrast to the overland flow kinematic wave solution, the unit hydrograph
is a conceptual model of runoff generation, spatially lumped, and based
exclusively on hydrologic data (streamflow measurements). Although originally
derived for large catchments (Sherman 1932), the method has been
found to have primary applicability to midsize catchments, i.e., those in
excess of 1 sq mi (2.5 km2 ) and less than 400 sq mi (1,000 km2). While
these limits are somewhat arbitrary, they tend to reflect current hydrologic
engineering practice. Furthermore, in the proper modeling context (i.e., with
catchment subdivision), the applicability of the unit hydrograph can be extended to large catchments.
Since the overland flow kinematic wave solution is primarily applicable
to small catchments, and the unit hydrograph is primarily applicable to midsize
(and, by extension, to large) catchments, it seems that there should be
little overlap between these two methods. In practice, however, existing
computer models [for instance, the U.S. Army Corps of Engineers HEC-1
(HEC-1 1985)] provide users with a choice between these two methods to
solve any given runoff problem, regardless of scale. This raises the question
of which method is better, or more accurate, for a given problem, a question
that has no clear answer. The methods are of such different nature and have
such different data needs that they are not readily comparable. Perhaps the
only defensible argument in this regard is that the kinematic wave solution
should increase in accuracy as the catchment size decreases; and the unit
hydrograph should increase in practicality as the catchment scale increases.
Specific comparisons between the two methods are likely to lead to heated
arguments, but the central issue of accuracy is not likely to be settled soon.
For one thing, the overland flow kinematic wave solution is based on our
currently imperfect knowledge of friction mechanisms, including the estimation
of Manning's n and of the rating exponent m describing the mixed
laminar-turbulent regime characterizing most overland flow situations. Likewise,
the unit hydrograph would have to be verified with concurrent rainfall-runoff data,
which are not readily available for the typical midsize catchment
application.
Keeping in mind the question of scale, the kinematic wave solution does
have the significant advantage that it can describe spatial and/or temporal
rainfall and roughness variations, which the unit hydrograph method, by virtue
of its being lumped, cannot do. Therefore, in situations where the scale
question can be reasonably compromised, the overland flow solution should
provide better detail in the simulation of flood flows, including the description
of runoff concentration and diffusion. Therein lies the promise of kinematic
waves and the expectation of significant improvements in the accuracy of runoff prediction.
As kinematic wave solutions continue to mature, particularly with the advent
of a physically meaningful description of runoff diffusion, the way will
be paved for the two methods of runoff generation to complement each other. There is an urgent need to develop synthetic
unit hydrographs that reach beyond established practice [the Snyder unit hydrograph,
to follow Corps of Engineers' practice; or the SCS dimensionless,
to follow the Soil Conservation Service, (USDA: SCS 1985)]. Acting on this
perceived need, the U.S. Bureau of Reclamation has developed a set of regional
synthetic unit hydrographs for use within its jurisdiction (11 western
United States) (USBR: Design 1987). In an attempt to overcome the shortcomings
of conventional synthetic unit hydrographs, local agencies are engaged
in developing synthetic unit hydrographs of the S-graph type (Sabol
1987, 1990). It is envisioned that under the proper modeling context, the
overland flow kinematic wave model may be used as a tool to develop synthetic
unit hydrographs without the burden of an extensive (and expensive)
network of streamflow data collection [see Overton (1970)].
A precedent for the use of models to synthesize peak flows already exists
in U.S. hydrologic practice: the TR-55 method (USDA: "Urban" 1986). This
SCS method of peak flow generation was developed using the hydrologic
catchment model TR-20 (USDA: "Computer" 1983) to generate synthetic
peak flows that take into account the catchment's concentration properties,
regional temporal rainfall distribution, and event-abstraction mechanisms of
infiltration and depression storage. The TR-55 method improves on the rational
method, substituting modeling for empiricism and leading to better
and more consistent runoff predictions.
8. KINEMATIC SHOCK
The kinematic shock was discussed in detail by Lighthitll and Whitham
(1955); and since then, numerous studies have endeavored to analyze its
causes and effects. But the subject continues to mystify researchers and practitioners
alike (Cunge 1969; Kibler and Woolhiser 1970). The shock arises
due to the nonlinear feature of kinematic waves, which under the right set
of circumstances can result in the kinematic wave steepening to the point
where it becomes for all practical purposes a wall of water. (In overland
flow situations, the "wall of water" would be a small discontinuity in the
water surface profile.) The shock is a direct consequence of the nonlinear
steepening tendency, which is abetted when the following conditions occur
(Ponce and Windingland 1985).
|
First, the wave is kinematic as opposed to diffusion (or dynamic). Diffusion
is a mechanism acting to oppose the nonlinear steepening tendency.
The more diffusive (or dynamic) a wave is, the less kinematic, and therefore,
the less the steepening tendency.
Second, there is a low base-to-peak flow ratio. The steepening tendency
is promoted when the flow is subject to large relative changes, with baseflow
being only a small fraction of peak flow. In the limit, as the baseflow approaches
zero, i.e., in the case of an ephemeral stream, the steepening tendency
(due to this condition) is greatest. This explains the fact that the shock
is a relatively more frequent occurrence in the case of flash floods in arid
and semiarid regions, which are caused by intense thunderstorms concentrating
large flows into ephemeral streambeds.
Third, there is a hydraulically wide and sufficiently long channel. Since
the wave steepening is gradual, a sufficiently long channel is needed to give
the shock a chance to develop. Strong steepening tendencies may require a
shorter reach; a weak tendency may never develop the shock, given the complicating
spatial effect of lateral inflows. A necessary condition for shock
development is that the channel be hydraulically wide, that is, one in which
the wetted perimeter is nearly constant. In practice, this hydraulic condition
is reflected in a canyon-type situation, with essentially vertical walls in which
as the flow increases, the wetted perimeter increases very little in comparison
with the increase in flow depth and area. Mathematically, this condition is
represented by a rating exponent β much greater than 1 (approaching β = 3/2
for Chezy friction; or β = 5/3 for Manning friction). Conversely, in
shallow-overbank flow situations (with channels rapidly expanding their top
width, such that the wetted perimeter increases in the same proportion as
the flow area, and consequently, the hydraulic radius remains nearly constant),
the steepening tendency is counteracted and shock development is
arrested. Mathematically, this condition is represented by a value of the rating exponent β ≅ 1.
Fourth, there is a high-Froude-number flow. In hydraulically wide channels,
high-Froude-number flows lack sufficient diffusion to effectively counteract
the steepening tendency (Ponce and Simons 1977). Therefore, at high
Froude numbers, at or above critical, the steepening tendency may be promoted
to the point where the shock may develop because of this condition.
Theoretically, as the Froude number for turbulent flow approaches the condition
of neutral stability (Fn = 1.5 for Manning friction; Fn = 2
for Chezy
friction), the shock becomes unstable and the theory ceases to apply. In
practice, however, such high-Froude-number flows are rare in natural steams
and rivers, and the instability is seldom, if ever, observed. However, in
artificial and other channels of relatively smooth boundary, free-surface instability
of the type discussed here leads to the well-known roll waves (Dressler
1949; Chow 1959; Jolly and Yevjevich 1971). These roll waves are
often seen in steep city streets and similar situations where prevailing laminar
(or mixed laminar-turbulent) flow conditions may reduce the neutral-stability
Froude number to values well below that corresponding to turbulent flow
(to Fn ≅ 1 for mixed laminar-turbulent flow; and to Fn = 0.5 for laminar flow).
|
The preceding four physical conditions contribute to shock development.
When all of them occur at the same time, the shock is very likely to develop.
If only one or two of them are present, the shock may not develop. While
the kinematic shock has been interpreted differently by many authors [see
for instance Cunge (1969) and Kibler and Woolhiser (1970)], there is no
doubt that the shock is physical and that it occurs under the proper set of
highly selective circumstances. Unfortunately, adequate documentation of
the occurrence of kinematic shocks in stream channels is lacking in the literature.
Measurements are next to impossible, with sightings being all that
diligent observers can settle for. The shock appears to be present in flash
floods, with the related killer flood being a nefarious manifestation of the
kinematic shock [see for instance Hjalmarson's account of the flood of July
26, 1982, in Tanque Verde Creek, east of Tucson, Arizona, in which the
lives of eight unsuspecting bathers were claimed by what was in all likelihood
a kinematic shock (Hjalmarson 1985)].
The conditions for kinematic shock development having been identified,
the question remains as to whether the kinematic shock is as common in
practice as calculations using an overland flow kinematic wave model would
seem to indicate. For instance, the shock is a common occurrence in kinematic
wave solutions using the method of characteristics. This is understandable,
since this method solves the kinematic wave equation without introducing
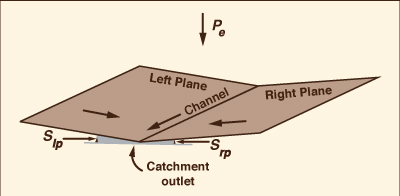
any numerical diffusion. A case in point: Kibler and Woolhiser (1970)
used the method of characteristics to study the cascade of planes as a possible
hydrologic model, and were able to derive a kinematic shock parameter
as a function of geometric and frictional characteristics of two adjacent planes.
However, in summarising their findings, Kibler and Woolhiser stated:
|
"While
the kinematic shock may arise under certain highly selective physical circumstances,
it is looked upon in this study as a property of the mathematical
equations used to explore the overland flow problem rather than an observable
feature of this hydrodynamic process." |
The shock is a much less common occurrence in finite difference solutions,
particularly when these feature a large numerical diffusion component.
For instance, the shock is conspicuously absent from the convex method,
which by fully offsetting its derivatives features a substantial amount of numerical
diffusion (Ponce et al. 1979). Characteristic solutions intrinsically
satisfy the aforementioned first condition; finite difference solutions usually
do not. However, as shown by Ponce and Windingland (1985), the shock
can indeed develop in finite difference solutions, particularly when the four
conditions are met concurrently.
In practice, the shock is an uncommon occurrence in natural channels. In
overland flow situations, the presence of shocks has been documented under
highly selective circumstances, usually in connection with overland flow in
long rectangular planes of constant slope (such as intense runoff on steep
city streets and parking lots). Spatial rainfall nonuniformities and small topographic
irregularities usually generate enough diffusion-like effects to
counteract shock development. Therefore, the presence of the shock in a
kinematic wave solution, more often than warranted (as in a characteristic
solution), must be interpreted as the method's inability to properly account
for catchment irregularities. Moreover, the practitioners' preference
for kinematic wave finite difference solutions, where the shock is an uncommon
occurrence, does not come as a great surprise (Alley and Smith 1982).
The resolution of this conflict appears to be in the proper description of
runoff diffusion within the context of a kinematic wave solution sensu
lato.
Diffusion will effectively counteract the nonlinear steepening tendency, which
is at the root of shock development. Such an improved kinematic wave formulation
should lead only to isolated instances of the shock's presence, and
therefore be much more in agreement with physical reality.
9. DYNAMIC EXTENSION TO KINEMATIC WAVES
Under the proper set of linearizing assumptions, kinematic wave theory
can be extended to the realm of dynamic waves (Ponce 1990). Early work
on this subject was done by Dooge (1973), who derived the expression for
a dynamic hydraulic diffusivity νd , for the case of a wide channel with Chezy
friction:
q Fo2
νd = _______ [ 1 - ______ ]
2So 4
| (9) |
For overland flow, a general expression for the dynamic hydraulic diffusivity is:
q
νd = _______ [ 1 - (m - 1)2 Fo2 ]
2So
| (10) |
which reduces to Eq. 9 for m = 3/2.
For streamflow and channel flow, an expression for the dynamic hydraulic
diffusivity is (Ponce 1986):
Q
νd = _______ [ 1 - (β - 1)2 Fo2 ]
2TSo
| (11) |
Since the hydraulic diffusivity vanishes at the condition of neutral stability,
Eqs. 9-11 do account for dynamic wave behavior (Ponce and Simons
1977). This condition is characterized by the Vedernikov number V = 1.
The Vedernikov number (Vedernikov 1945; Powell 1948; Craya 1952; Chow 1959) is:
|
V = (m - 1)Fo = (β - 1)Fo
| (12) |
Given Eqs. 10-12, the dynamic hydraulic diffusivity can be expressed in
terms of the Vedernikov number as follows:
q Q 2
νd = _______ [ 1 - V 2 ] = _______ [1 - V 2 ]
2So 2TSo
| (13) |
For β = 1 [i.e., a channel of rapidly expanding top width such that the
wetted perimeter increases in the same proportion as the flow area (a channel
of constant hydraulic radius)], Eq. 12 predicts that V = 0, and the dynamic
hydraulic diffusivity (Eq. 13) reduces to the hydraulic diffusivity of Eq. 5.
This confirms the practical observation that a kinematic shock does not occur
in a channel with a rating exponent β ≅ 1.
Given Eq. 13, it is possible to extend kinematic wave theory to the realm
of dynamic waves. >A
dynamic component can then be effectively incorporated
into overland flow solutions while remaining within the same computational
framework of kinematic wave solutions. The use of a dynamic
(i.e., a Vedernikov-number-dependent) hydraulic diffusivity is bound to be
more general than either kinematic or diffusion wave solutions, particularly
in situations in which the Vedernikov number is substantially different from
zero (for instance, for near-critical and supercritical inbank flows). However,
its practicality when applied to overland flow problems remains to be determined by additional work.
10. SUMMARY AND CONCLUSIONS
Kinematic and diffusion wave theories are reviewed prompted by the continuing
controversy regarding their nature and applicability. Kinematic waves
are shown to be nondiffusive but undergo change in shape during propagation
due to nonlinearity. In overland flow and inbank streamflow this feature
gives kinematic waves the capability of steepening, eventually leading
to the formation of the kinematic shock. The kinematic shock is shown to
be rare, and to occur only under a set of highly selective circumstances,
including: (1) A kinematic wave proper; (2) a low base-to-peak flow ratio;
(3) a hydraulically wide and sufficiently long channel; and (4) a high-Froude-number
flow. The common occurrence of the kinematic shock in overland
flow kinematic wave solutions, particularly when using the method of characteristics,
is attributed to the total absence of runoff diffusion in these solutions.
In practice, small flow and catchment irregularities usually produce
enough diffusion-like effects to counteract the development of the shock.
Kinematic wave solutions using finite differences are shown to possess
intrinsic amounts of numerical diffusion and dispersion, as a direct consequence
of the finite grid size. These numerical effects are artificial, tending to disappear
as the grid size is refined. In the limit, as the grid size approaches
zero, the numerical effects vanish altogether. In practice, this means that
overland flow kinematic wave solutions are grid dependent; that is, the results
are a function of grid size, with a typical solution featuring appreciable
amounts of numerical diffusion and dispersion.
Kinematic wave modeling can be improved by extending kinematic wave
theory to the realm of diffusion waves. In this way, the diffusion inherent
in many practical runoff computations can be amounted for directly in the
modeling, rather than as an afterthought. In this regard, the Muskingum-Cunge
method is particularly attractive, because while remaining within the
computational framework of kinematic wave models, it has enough physical
information to compare favorably with implicit numerical solutions of the
diffusion wave equation. Unlike conventional finite difference kinematic wave
models, the Muskingum-Cunge method is shown to be grid independent,
further underscoring its usefulness as a practical model of diffusion waves.
The applicability of kinematic and diffusion waves is reviewed. It is concluded,
echoing many past authors, that most overland flow situations would
satisfy the kinematic wave criterion, and that most flood wave propagation
cases in stream channels would satisfy the diffusion wave criterion. Only in
situations with markedly strong dissipative tendencies or substantial downstream
control would it be necessary to resort to the dynamic wave to properly
describe the propagation of shallow water waves.
The issue of the choice between kinematic wave and unit hydrograph
methods for practical runoff computations is examined with the aid of the
concept of catchment scale. The use of the kinematic wave method is indicated
primarily for small catchments [those less than 1 sq mi (2.5 km2)],
particularly in the cases in which it is possible to resolve the physical detail
without compromising the deterministic nature of the model. The use of the
unit hydlograph method is advocated for midsize catchments; i.e. those greater
than 1 sq mi (2.5 km2) but less than 400 sq mi (1,000 km2),
in which the
kinematic wave method may prove difficult to implement. A case is made
for the use of the kinematic wave as a tool for the development of synthetic
unit hydrographs.
The dynamic extension to kinematic and diffusion wave theory is reviewed
with a view to the future. The dynamic extension is shown to properly account
for the dependence of the hydraulic diffusivity on the Vedernikov
number, allowing the simulation to be responsive to the dynamic effect. This
type of modeling would be particularly applicable to channel and flow conditions
such that the Vedernikov number is substantially different from zero,
for instance, for near-critical and supercritical inbank flows.
APPENDIX I. REFERENCES
Abbott, M. B. 1976. "Computational hydraulics: A short pathology." J. Hydr. Res., 14(4), 271-285.
Alley, W. M., and P. E. Smith. 1982. "Distributed routing rainfall-runoff model ___
version II: User's manual." Open-File Report 82-344, U.S. Geological Survey
Water Resources Division, Gulf Coast Hydroscience Center, NSTL Station, Miss.
Chow, V. T. 1959. Open-channel hydraulics. McGraw Hill Book Co., Inc., New York, N.Y.
"Computer program for project formulation-hydrology." (1983). USDA Soil Conservation Service,
Tech. Release No. 20 (TR-20), Washington, D.C.
Cunge, J. A. 1969. "On the subject of a flood propagation computation method
(Muskingum method)." J. Hydr. Res., 7(2), 205-230.
Crandall, S. H. 1956. Engineering analysis: A survey of numerical procedures.
McGraw-Hill Book Co., New York, N.Y.
Craya, A. 1952. "The criterion for the possibility of roll wave formation." Proc.,
Gravity Waves Symp., Circular 521, U.S. National Bureau of Standards, Washington, D.C., 294-332.
Dawdy, D. R. 1990. Discussion of "Kitthmatic wave routing and computational
errror." J. Hydr. Engrg., ASCE, 116(2), 278-280.
Design of Small Dams, 3rd ed. 1987. U.S. Bureau of Reclamation, Denver, Colo.
Dooge, J. C. I. 1973. "Linear theory of hydrologic systems." Tech. Bulletin No.
1468, USDA Agricultural Research Service, Washington, D.C.
Dressler, R. F. 1949. "Mathematical solution of the problem of roll waves in inclined open channels."
Communications in Pure and Appl. Mathematics, 2, 149-194.
Flood Studies Report. 1975. Natural Environment Research Council, London, England, Vol. III.
Goldman, D. 1990. Discussion of "Kinematic wave routing and computational error."
J. Hydr. Engrg., ASCE, 116(2), 280-282.
Hayami, S. 1951. "On the propagation of flood waves." Bulletin of the Disaster
Prevention Research Institute, Disaster Prevention Research Institute, Kyoto, Japan, 1(1), 1-16.
HEC-1, Flood Hydrograph Package: Users' Manual. 1985. U.S. Army Corps of
Engineers, Hydrologic Engineering Center, Davis, Calif.
Hjalmarson, H. W. 1984. "Flash flood is Tanque Verde Creek, Tucson, Arizona,"
J. Hydr. Engrg., 110(12), 1841-1852.
Hjelmfelt, A. T. 1984. "Negative outflows from Muskingum flood routing." J. Hydr. Engrg.,
ASCE, 111(6), 1010-1014.
Hromadka, T. V., and J. J. DeVries. 1988. "Kinematic wave and computational
error." J. Hydr. Engrg., ASCE, 114(2), 207-217.
Hromadka, T. V., and J. J. DeVries. 1990. Closure of "Kinematic wave and computational error."
J. Hydr. Engrg., ASCE, 116(2), 288-289.
Jolly, P. J., and V. Yevjevich. 1971. "Amplification criterion of gradually varied,
single peaked waves." Hydrol. Paper No. 51, Colorado State University, Fort
Collins, Colo.
Kibler, D. F., and D. A. Woolhiser. 1970. "The kinematic cascade as a hydrologic
model." Hydrol. Paper No. 39, Colorado State University, Fort Collins, Colo.
Leendertse, J. J. 1967. "Aspests of a computational model for long-period water
wave propagation." RM.5294.PR, The Rand Corporation, Santa Monica, Calif.
Liggett, J. A. 1975. "Basic equations of unsteady flow." Unsteady flow in open
channels, K. Mahmood and V. Yevjevich, eds., Water Resources Publications.
Fort Collins, Colo., Vol. 1.
Lighthill, M. J., and G. B. Whitham. 1955. "On kinematic waves. I: Flood movement in long rivers."
Proc., Royal Society, London, England, A229, 281-316.
Merkel, W. H. 1990. Discussion of "Kinematic wave routing and computational
error." J. Hydr. Engrg., ASCE, 116(2), 282-284.
Morris, E. M., and D. A. Woolhiser. 1980. "Unsteady one-dimensional flow over
a plane: Partial equilibrium and recession hydrographs." Water Resour. Res., 16(2),
355-360.
Overton, D. E. 1970. "Route or Convolute?" Water Resour. Res., 6(l), 43-52.
Ponce, V. M., and Simons, D. B. 1977. "Shallow wave propagation in open channel
flow." J. Hydr. Div., ASCE, 103(12), 1461-1476.
Ponce. V. M., R. M. Li, and D. B. Simons. 1978. "Applicability of kinematic
and diffusion models." J. Hydr. Div., ASCE, 104(3), 353-360.
Ponce, V. M., and Yevjevich, V. 1978. "Muskingum-Cunge method with variable
parameters." J. Hydr. Div., ASCE, 104(12), 1663-1667.
Ponce, V. M., Y. H. Chen, and D. B. Simons. 1979. "Unconditional stability in
convection computations." J. Hydr. Div., ASCE, 105(9), 1079-1086.
Ponce, V. M., and F. D. Theurer. 1982. "Accuracy criteria in diffusion routing."
J. Hydr. Div., ASCE, 108(6), 747-757.
Ponce, V. M., and D. Windingland. 1985. "Kinematic shock: Sensitivity analysis."
J. Hydr. Engrg., ASCE, 111(4), 600-611.
Ponce, V. M. 1986. "Diffusion wave modeling of catchment dynamics."
J. Hydr. Engrg., ASCE, 112(8), 716-727.
Ponce, V. M. 1990. "Genenilized diffusion wave model with inertial effects."
Water Resour. Res., 26(5). 1099-1101.
Powell, R. W. 1948.
"Vedernikov criterion for ultrarapid flow."
Transactions, American Geophysical Union, 29(6), 882-886.
Sabol, G. V. 1987. "Development, use, and synthesis of S.graphs." Proc., Engrg.
Hydrol. Symp., ASCE. New York, N.Y., 627-632.
Sabol". G. V. 1990. "Maricopa County hydrology procedure." Proc., Watershed
Management Symp., ASCE, New York, N.Y., 423-431.
SCS National Engineering Handbook, Section 4: Hydrology. 1985. USDA Soil Conservation
Service, Washington, D.C.
Seddon, J. A. 1900. "River hydraulics." Trans., ASCE, 43, 179-229.
Sherman, L. K. 1932. "Streamflow from rainfall by unit-graph method." Engrg.
News Record, 108, April 7, 501-505.
Unkrich, C. L., and D. A. Woolhiser. 1990. Discussion of "Kinematic wave routing and computational error."
J. Hydr. Engrg., ASCE, 116(2), 284-286.
"Urban Hydrology for Small Watersheds." 1986. Tech. Release No. 55 (TR-55),
USDA Soil Conservation Service, Washington, D.C.
Vedernikov, V. V. 1945. "Conditions at the front of a translation wave distributing
a steady motion of a real fluid." Comptes Rendus (Doklady) de l'Academie des
Sciences de l' U.R.S.S., (in French), 48(4).
Woolhiser, D. A., and J. A. Liggett. 1967. "Unsteady one-dimensional flow over
a plane-the rising hydrograph." Water Resour. Res., 3(3), 753-771.
Woolhiser, D. A., and D. C. Goodrich. 1990. Discussion of "Kinematic wave
routing and computational error." J. Hydr. Engrg., ASCE, 116(2), 278-288.
APPENDIX II. NOTATION